
1. ADAS en AV.
ADAS (Advanced Driver Assistance Systems) ontwikkelt zich in hoog tempo, denk aan emergency break, adaptive Cruise control, self-parking, blind spot detectie. Prijzen gaan snel omlaag bij toename in volume. Concurrentie en consumentenvraag dwingen tot snelle toepassing in “gewone” auto’s. De tijd tussen market entry (in premium auto’s) en toepassing in de high volume auto’s is gekrompen van meer dan 5 jaar naar minder dan 2 jaar. Nieuwe features komen niet zo af en toe, maar er is een continue stroom van vernieuwing, vaak natuurlijk door het steeds meer integreren en combineren van bestaande elementen in een auto, waarmee die vernieuwing steeds sneller gaat.
De Autonome auto (AV, Autonomous Vehicle) lijkt oneerbiedig gezegd zo’n vergaarbak, maar is echt meer dan alleen maar een verzameling van die ADAS-features. De verwachtingen zijn hoog gespannen; binnen een paar jaar rijden we 100% autonoom, maar dat is wat overdreven. Er zijn nog wat hobbels te overwinnen, zowel technisch als bijvoorbeeld in acceptatie door de consument.
2. Wat is het ook al weer?
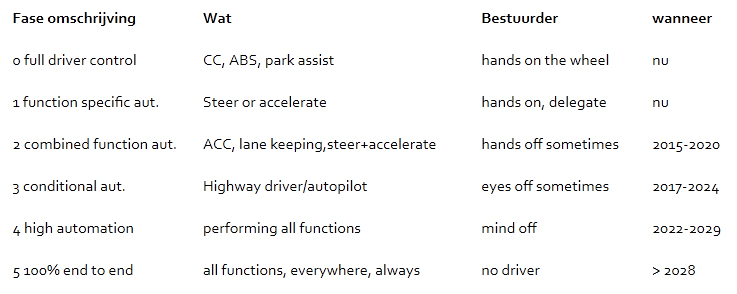
Het gaat je duizelen met alle technische termen en afkortingen rondom die AV. De 100% autonome auto is er niet zo maar; er wordt uitgegaan van een stapsgewijze ontwikkeling. (noot: er zijn veel mooie plaatjes en schema’s beschikbaar waar deze fasen in staan beschreven/getekend).
3. Waarom een doorbraak?
De geschiedenis geeft soms aanknopingspunten. De autogordel werd ontwikkeld in de jaren ’50, de 3 punt gordel werd pas verplicht in 1975. Het eerste octrooi voor de airbag dateert uit 1951, grootschalige toepassing begon in de jaren ’80 en Mercedes voerde het pas in 1992 in als standaard. Cruise control werd in 1945 bedacht maar werd voor het eerst in 1958 toegepast.
Mooi dat die technologie er is, maar waarom zou het een succes worden, waarom ontstaat er een doorbraak?
Om te beginnen de al genoemde versnellende combinatie van technologieën. Ik beperk me hier tot connectiviteit, de elektrische auto en de autonome auto. De kracht zit hem in de combinatie. Om een autonoom rijdende auto goed te kunnen gebruiken en bijvoorbeeld te kunnen delen, zijn data (dus connectiviteit) onmisbaar. Daar waar autonome auto’s met name in stedelijke gebieden worden gebruikt, is een combinatie met elektrische aandrijving logisch(emissies, geluid e.d.).
Dat leidt tot de volgende overweging. Consumenten vragen om andere vormen van mobiliteit met meer comfort, flexibiliteit, en een ander/lager prijskaartje. Tegelijk is die consument terughoudend en accepteert niet a la minute verandering, maar tijd en geleidelijkheid doen wonderen.
De derde overweging is de wereld waarin we leven (en generaties na ons, is de bedoeling). We worden geconfronteerd met vraagstukken die om een oplossing vragen. Denk aan de noodzaak tot een energietransitie, tot reductie van CO2 en andere schadelijke stoffen, tot het oplossen/vermijden van complete stagnatie in infrastructuur als gevolg van nog veel meer auto en automobiliteit en van snel toenemende verstedelijking. Denk aan de hoge economische en maatschappelijke kosten van mobiliteit in infrastructuur, ongevallen/gezondheidszorg/verzuim/overlijden etc.
De drie-eenheid van “technology push, demand pull and global needs” maakt een doorbraak waarschijnlijk. De auto was en is een onderdeel van veel problemen maar kan op deze manier ook een belangrijk deel van de oplossing worden.
4. Wat schieten we er mee op?
Ook hier geldt weer dat je de voordelen (en trouwens ook de nadelen) moet bekijken in relatie tot ander technologie, consument en “wereld”.
- infrastructuur kan beter worden benut, meer auto’s connected op een zelfde stuk snelweg.
- minder ongevallen, minder schade, minder verkeersdoden, minder zorgkosten
- autonome auto’s (vooral in combinatie met sharing) worden intensiever gebruikt(meer uren/dag)
- daarmee verminderen het aantal benodigde parkeerplaatsen met name in steden, en het “parkeerplaats zoekende” verkeer met meer dan 20%
- bestuurders winnen veel tijd: niet sturen, maar lezen, werken, bellen, relaxen
- het aantal auto’s zal verminderen; van 2 naar 1 auto per gezin, 100% van eigendom naar gebruik
- automobiliteit wordt toegankelijker voor meer consumenten(gehandicapt, kinderen)
- car on demand: tijd/plaats specifiek; auto parkeert zichzelf buiten dichtbevolkt gebied
- mengvormen van particulier bezit/gebruik met vormen van OV
- vraag naar automobiliteit stijgt sterk (bevolkingsgroei, nieuwe gebruikers, meer welvaart, ander woon/werk/leefpatronen en gedrag)
- verzekeraars krijgen klappen (50% en meer reductie in premievolumes)
- minder auto dus minder onderhoud, tenzij auto’s intensiever worden gebruikt (meer kilometers)
- op retailniveau: wellicht minder onderhoud, minder schades, minder onderdelen
- overheid: minder belastingopbrengsten uit MRB, BTW, accijnzen etc.
- voor menig consument: het wegvallen van de kick van het autorijden, de controle over stuur, pedalen en vermogen (gecompenseerd door meer aandacht voor interieur en ander gebruik ervan, de power van een elektromotor, de fun en comfort, en de lagere uitgaven).
5. Waarom hebben we die autonome auto niet morgen?
Een aantal redenen.
- er zijn nog discussies over de hardware, bijvoorbeeld over gebruik van radar/lidar/camera; natuurlijk in relatie tot de functionaliteit en de kosten.
- hardware kan veel detecteren (essentieel natuurlijk) maar er moet nog worden verbeterd aan nauwkeurigheid, functioneren onder slechte (weers)omstandigheden, onderscheid tussen
bewegend en stilstaand, onderscheid tussen verschillende object-typen (auto, vuilnisbak, persoon, fiets etc.) - de berijder is soms de onbetrouwbare factor. Is die in staat (bij level 2 en 3) om snel en adequaat in te grijpen en de controle over te nemen? hoe is de reactiesnelheid, in relatie tot de inmiddels afgelegde afstand, en gegeven het feit dat die bestuurder zit te lezen/gamen/film kijkt etc.
- elk van de features (camera, lidar, radar, infrarood, ultrasoon, GPS) genereert data; het combineren en vervolgens interpreteren/vertalen van die data naar actie, software dus, vraagt nog aandacht
- interpretatie en het nemen van beslissingen in een fractie van een seconde blijft een issue. Hier komen veiligheidsaspecten in beeld, maar vooral ook de ethiek. De bekende voorbeelden zoals het dilemma 1: rijd ik mijn eigen auto stuk of laat ik iemand anders crashen of dilemma 2: wie rijd ik aan of zelfs dood, een ouder iemand of een jonge moeder?
- dit vereist complexe algoritmes en zelflerende systemen, deep learning en cloud learning (die grote hoeveelheden data/situaties van grote aantallen gebruikers als basis gebruiken)
- systemen moeten niet alleen registreren en uit verschillende bronnen data integreren maar ook nog eens voorspellen: hoe gedragen andere verkeersdeelnemers zich en wat doen die in de komende seconde? En wat betekent dat dan? welke opties zijn er voor mij/mijn auto?
- allerlei data en functionaliteiten vragen om periodieke updating; haalbaar maar werk aan de winkel
- systemen moeten foutloos en storingsvrij zijn; back-ups zijn nodig (denk aan vliegtuigen), systemen die snel kunnen overnemen.
6. Hoe kijk je naar de toekomst.
Er 2 manieren om te kijken naar de toekomst.
De traditionele denkers geloven in het voortbestaan van de huidige verhoudingen, het bestaande business model, en verandering in kleine stapjes. Wat negatiever geformuleerd: het zal zo’n vaart niet lopen, we zitten er niet op te wachten, er is tijd genoeg.
De disruptors zien op korte termijn fundamentele verandering, de grote omslag; overal is disruptie, overal zijn nieuwe toetreders met nieuwe business modellen, die geen gevestigde belangen hebben.
En met enig fanatisme en veel feiten (inclusief alternative facts) wordt het eigen gelijk geclaimd en wordt de andersdenkende bij de enkels afgezaagd. Voordat je het weet, wordt het een discussie tussen insiders, petrol heads en conservatieven enerzijds en love & peace groene denkers en dromers anderzijds.
Het zou nuttig zijn om de vraag: komt die autonome auto (of iets anders) er ja of nee, te splitsen in verschillende vragen (zoals ik probeer te doen in dit stuk): wat is het, waar staan we in ontwikkeling, welke voor- en nadelen brengt het met zich mee, waarom wordt het een succes of juist niet, hoe ziet de tijdslijn eruit?
7. Oh ja, die consument.
Consumenten houden niet van (snelle) verandering, willen op zijn minst het gevoel hebben zelf die verandering te sturen en wat in controle te zijn. Onzekerheid ligt altijd op de loer en leidt tot risicomijdend gedrag en behoudzucht.
We zien dat terug in marktonderzoek. Van de Nederlandse consumenten zegt 55% het stuur compleet in eigen hand te willen houden, 12% is neutraal, en 33% is positief over autonoom rijden. (Onderzoek Maurice de Hond/zelfsturing.it). KPMG noemt een schamele 20% dat ja zegt tegen autonoom rijden onder voorwaarde dat dat betaalbaar en veiliger is.
Internationaal onderzoek (o.a. in Frankrijk, China, Duitsland, USA en Nederland) laat zien dat 46% waarschijnlijk geen eigen auto meer koopt als de zelfrijdende auto er eenmaal is, en beschikbaar tegen lagere kosten. In Nederland zou dit 41% zijn, In China 73%, de USA 65% etc.
Nog maar 3 jaar geleden gaf BCG aan dat 23% van de consumenten zeer waarschijnlijk een volledig autonoom rijdende auto zou nemen (21% waarschijnlijk); 24% wilde tot 5000$ extra betalen voor zo’n auto. Dit bedrag kwam ook naar voren in onderzoek in 2016.
Maar consumenten blijven dat autonome wat wantrouwen. Slechts 20% wil 100% controle en beslissing uit handen geven aan die autonome auto. Risico’s worden wat uitvergroot terwijl voordelen minder worden gezien. Pas als deze worden benoemd, dan nuanceert de consument zijn oordeel iets.
Bij de vraag wie die autonome auto en technologie moet gaan leveren, blijkt dat 47% primair vertrouwen heeft in het merk-kanaal (dan toch liever de dealer) en “slechts” 33% meer geloof heeft in de nieuwe spelers/specialisten.
8. Dan toch die stip op de horizon.
Ik ben niet zo van de stippen. Maar om een paar getallen te noemen.
Rond 2026 zal vrijwel 100% van de nieuwe auto’s uitgerust kunnen zijn op level 2 en 3. Level 4 is dan al volop in ontwikkeling en breekt kort daarna door. Het ultieme level 5 vindt zijn “tipping point” rond 2030.
De echt 100% autonoom rijdende auto zal zo’n 10% uitmaken van de nieuwverkoop rond dat jaar 2030, maar dit percentage zal daarna snel stijgen naar meer dan 30% in 2035 en verder.
Tot die tijd de handen aan het stuur (stand 10 voor 2 leerden we vroeger), de voet(baksteen) op het gaspedaal, kijk voor je en in de spiegels en realiseer je dat je niet de enige bent op de weg, dat je niet lekker autonoom tekeer kunt gaan. Zo halen we samen 2030, een mooi vooruitzicht.
Hans Groenhuijsen Advies in automotive en mobiliteit.
December 2017.
Heineke K., Kampshoff P., “self-driving car technology: when will the robots hit the road”,
Mc Kinsey, May 2017.